|
cuIBM
A GPU-based Immersed Boundary Method code
|
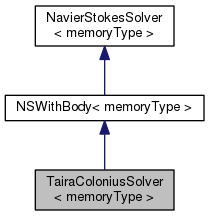
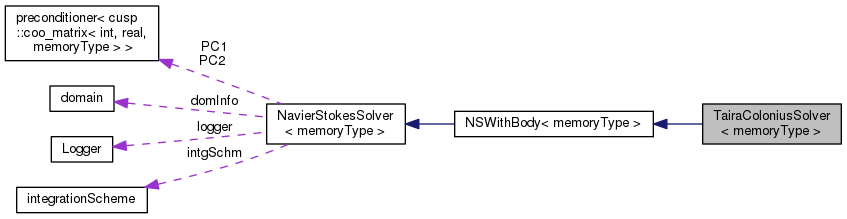
Solves the Navier-Stokes equations using the Immersed boundary method from Taira and Colonius (2007). More...
#include <TairaColoniusSolver.h>
Public Member Functions | |
| TairaColoniusSolver (parameterDB *pDB=NULL, domain *dInfo=NULL) | |
| Constructor. Copies the database and information about the computational grid. More... | |
| virtual void | initialise () |
| Initializes the solvers. More... | |
| virtual void | writeData () |
| Calculates and writes forces acting on each immersed body at current time. More... | |
| virtual std::string | name () |
| Returns the name of the solver. More... | |
 Public Member Functions inherited from NSWithBody< memoryType > Public Member Functions inherited from NSWithBody< memoryType > | |
| virtual void | writeCommon () |
| Writes flow variables and position of body points into files. More... | |
| virtual void | shutDown () |
| Closes iteration file and force file. More... | |
| Public Member Functions inherited from NavierStokesSolver< memoryType > | |
| NavierStokesSolver (parameterDB *pDB=NULL, domain *dInfo=NULL) | |
| Constructor. Copies the database and information about the computational grid. More... | |
| void | stepTime () |
| Calculates the variables at the next time step. More... | |
| bool | finished () |
| Evaluates the condition required to stop the simulation. More... | |
Private Member Functions | |
| virtual void | generateQT () |
| void | updateQT () |
| virtual void | generateBC2 () |
| virtual void | updateSolverState () |
| Updates the location of the bodies and re-generates appropriate matrices. More... | |
| virtual void | calculateForce () |
| Calculates forces acting on each immersed body. More... | |
| template<> | |
| void | generateBC2 () |
| Generates the right hand-side of the Poisson system. More... | |
| template<> | |
| void | updateQT () |
| Updates the interpolation matrix using the current locations of body points. More... | |
| template<> | |
| void | generateQT () |
| Generates the transposed gradient matrix and interpolation matrix. More... | |
Private Attributes | |
| cusp::coo_matrix< int, real, memoryType > | E |
| Interpolation matrix from the Eulerian grid to the Lagrangian points. More... | |
| cusp::coo_matrix< int, real, memoryType > | ET |
| Regularization matrix form the Lagrangian points to the Eulerian grid. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from NSWithBody< memoryType > | |
| void | initialiseBodies () |
| Stores the parameters of the simulation and initializes the location and motion of each immersed bodies. More... | |
| void | updateBodies () |
| Updates location and motion of each immersed body at current time. More... | |
| template<> | |
| void | calculateForce () |
| Calculates forces acting on an immersed body. More... | |
| Protected Member Functions inherited from NavierStokesSolver< memoryType > | |
| void | initialiseCommon () |
| Initializes parameters common to all Navier-Stokes solvers. More... | |
| void | initialiseArrays (int numQ, int numLambda) |
| Initializes all arrays required to solve the Navier-Stokes equations. More... | |
| virtual void | initialiseFluxes () |
| virtual void | initialiseFluxes (real *q) |
| Initializes velocity flux vectors. More... | |
| void | initialiseBoundaryArrays () |
| Initializes boundary velocity arrays with values stored in the database. More... | |
| void | assembleMatrices () |
| Assembles matrices of the intermediate flux solver and the Poisson solver. More... | |
| void | generateM () |
| virtual void | generateL () |
| virtual void | generateA (real alpha) |
| void | generateBN () |
| Generates approximate inverse of the matrix resulting from implicit velocity terms. More... | |
| void | updateQ (real gamma) |
| Doing nothing. More... | |
| virtual void | generateC () |
| void | generateRN () |
| Generates explicit terms of the momentum equation. More... | |
| void | calculateExplicitQTerms () |
| virtual void | calculateExplicitLambdaTerms () |
| Doing nothing. Used in methods that use the explicit pressure term in the intermediate velocity solve step, such as FadlunEtAlSolver and DFModifiedSolver. More... | |
| virtual void | generateBC1 () |
| virtual void | assembleRHS1 () |
| Assembles the right hand-side of the system for the intermediate flux. More... | |
| void | assembleRHS2 () |
| Assembles the right hand-side of the Poisson system. More... | |
| virtual void | solveIntermediateVelocity () |
| Solves for the intermediate flux velocity. More... | |
| virtual void | solvePoisson () |
| Solves the Poisson system. More... | |
| virtual void | projectionStep () |
| Projects the flux onto the divergence-free field. More... | |
| void | updateBoundaryConditions () |
| Doing nothing. More... | |
| template<> | |
| void | generateA (real alpha) |
| Assembles the matrix from implicit terms of momentum equation. More... | |
| template<> | |
| void | generateBC1 () |
| Generates inhomogeneous boundary conditions from the discrete Laplacian operator. More... | |
| template<> | |
| void | generateBC2 () |
| Generates inhomogeneous boundary conditions from the discrete continuity equation. More... | |
| template<> | |
| void | generateL () |
| Generates the discrete Laplacian matrix. More... | |
| template<> | |
| void | generateM () |
| Generates the mass matrix and its inverse. More... | |
| template<> | |
| void | generateQT () |
| Generates the discrete divergence matrix. More... | |
| template<> | |
| void | calculateExplicitQTerms () |
| Generates explicit terms that arise from the velocity fluxes. More... | |
| template<> | |
| void | initialiseFluxes () |
| Initializes velocity flux vectors (on the device). More... | |
| template<> | |
| void | generateC () |
| Generates the matrix of the Poisson solver. More... | |
| Protected Attributes inherited from NSWithBody< memoryType > | |
| bodies< memoryType > | B |
| bodies in the flow More... | |
| real | forceX |
| force acting on each body in the x-direction More... | |
| real | forceY |
| force acting on each body in the y-direction More... | |
| std::ofstream | forceFile |
| file to write the forces More... | |
| Protected Attributes inherited from NavierStokesSolver< memoryType > | |
| parameterDB * | paramDB |
| database that contains all the simulation parameters More... | |
| domain * | domInfo |
| computational grid information More... | |
| integrationScheme | intgSchm |
instance of the class integrationScheme More... | |
| real | QCoeff |
| cusp::coo_matrix< int, real, memoryType > | M |
| diagonal mass matrix More... | |
| cusp::coo_matrix< int, real, memoryType > | Minv |
| inverse of the mass matrix More... | |
| cusp::coo_matrix< int, real, memoryType > | L |
| discrete Laplacian matrix More... | |
| cusp::coo_matrix< int, real, memoryType > | A |
| combination of mass and Laplacian matrices More... | |
| cusp::coo_matrix< int, real, memoryType > | Q |
| gradient matrix (and regularization matrix if immersed body) More... | |
| cusp::coo_matrix< int, real, memoryType > | QT |
| transposed gradient matrix (and interpolation matrix if immersed body) More... | |
| cusp::coo_matrix< int, real, memoryType > | BN |
N-th order Taylor series expansion of the inverse of A. More... | |
| cusp::coo_matrix< int, real, memoryType > | C |
| matrix of the Poisson system More... | |
| cusp::array1d< real, memoryType > | q |
| velocity flux vector More... | |
| cusp::array1d< real, memoryType > | qStar |
| intermediate velocity flux vector More... | |
| cusp::array1d< real, memoryType > | qOld |
| velocity flux vector at the previous time-step More... | |
| cusp::array1d< real, memoryType > | lambda |
| pressure vector (and body forces if immersed body) More... | |
| cusp::array1d< real, memoryType > | rn |
| explicit terms of the momentum equation More... | |
| cusp::array1d< real, memoryType > | bc1 |
| inhomogeneous boundary conditions from the discrete Laplacian operator More... | |
| cusp::array1d< real, memoryType > | bc2 |
| inhomogeneous boundary conditions from the discrete continuity equation More... | |
| cusp::array1d< real, memoryType > | rhs1 |
| right hand-side of the system for the intermediate velocity flux vector More... | |
| cusp::array1d< real, memoryType > | rhs2 |
| right hand-side of the Poisson system More... | |
| cusp::array1d< real, memoryType > | H |
| hold convective terms from previous time step More... | |
| cusp::array1d< real, memoryType > | temp1 |
| temporary 1D Cusp array More... | |
| cusp::array1d< real, memoryType > | temp2 |
| temporary 1D Cusp array More... | |
| cusp::array1d< real, memoryType > | bc [4] |
| array that contains the boundary conditions of the rectangular domain More... | |
| preconditioner< cusp::coo_matrix< int, real, memoryType > > * | PC1 |
| preconditioner for the intermediate flux solver More... | |
| preconditioner< cusp::coo_matrix< int, real, memoryType > > * | PC2 |
| preconditioner for the Poisson solver More... | |
| size_t | timeStep |
| iteration number More... | |
| size_t | subStep |
| number of sub-iterations More... | |
| size_t | iterationCount1 |
| number of iteration to solve the intermediate fluxes More... | |
| size_t | iterationCount2 |
| number of iteration to solve the Poisson equation More... | |
| Logger | logger |
instance of the class Logger to track time of different tasks More... | |
| std::ofstream | iterationsFile |
| file that contains the number of iterations More... | |
Solves the Navier-Stokes equations using the Immersed boundary method from Taira and Colonius (2007).
The immersed boundary method: a projection approach
Taira K. and Colonius T.
Journal of Computational Physics
Volume 225 Number 2 (2007).
Definition at line 24 of file TairaColoniusSolver.h.
| TairaColoniusSolver< memoryType >::TairaColoniusSolver | ( | parameterDB * | pDB = NULL, |
| domain * | dInfo = NULL |
||
| ) |
Constructor. Copies the database and information about the computational grid.
Definition at line 16 of file TairaColoniusSolver.cu.
|
privatevirtual |
Calculates forces acting on each immersed body.
For each immersed body, it spreads the Lagrangian forces on the Eulerian grid and sum the entire field to get the x- and y- components of the force.
Reimplemented from NSWithBody< memoryType >.
Definition at line 19 of file calculateForce.inl.
References NSWithBody< memoryType >::forceX, and NSWithBody< memoryType >::forceY.
|
privatevirtual |
Generates the right hand-side of the Poisson system.
It contains the inhomogeneous boundary conditions from the discrete divergence operator, as well as the no-slip boundary condition at the body surface.
Reimplemented from NavierStokesSolver< memoryType >.
Definition at line 19 of file generateBC2.inl.
|
privatevirtual |
Reimplemented from NavierStokesSolver< memoryType >.
|
privatevirtual |
Reimplemented from NavierStokesSolver< memoryType >.
|
privatevirtual |
Generates the transposed gradient matrix and interpolation matrix.
QT is an (np + 2*nb) x nuv matrix
Reimplemented from NavierStokesSolver< memoryType >.
Definition at line 70 of file generateQT.inl.
References kernels::generateQT(), and kernels::updateQT().
|
virtual |
Initializes the solvers.
Initializes bodies, arrays and matrices of the intermediate flux solver and the Poisson solver.
Reimplemented from NavierStokesSolver< memoryType >.
Definition at line 31 of file TairaColoniusSolver.cu.
References NavierStokesSolver< memoryType >::assembleMatrices(), NavierStokesSolver< memoryType >::initialiseArrays(), NSWithBody< memoryType >::initialiseBodies(), and NavierStokesSolver< memoryType >::initialiseCommon().
|
inlinevirtual |
Returns the name of the solver.
Reimplemented from NavierStokesSolver< memoryType >.
Definition at line 59 of file TairaColoniusSolver.h.
|
private |
Updates the interpolation matrix using the current locations of body points.
Typically called after the body has moved.
Definition at line 20 of file generateQT.inl.
References BLOCKSIZE.
|
private |
|
privatevirtual |
Updates the location of the bodies and re-generates appropriate matrices.
Updates only done if the bodies are moving. It re-generates the interpolation matrix, therefore the Poisson matrix too.
Reimplemented from NavierStokesSolver< memoryType >.
Definition at line 98 of file TairaColoniusSolver.cu.
References NavierStokesSolver< memoryType >::generateC(), NSWithBody< memoryType >::updateBodies(), and kernels::updateQT().
|
virtual |
Calculates and writes forces acting on each immersed body at current time.
Reimplemented from NavierStokesSolver< memoryType >.
Definition at line 61 of file TairaColoniusSolver.cu.
References NSWithBody< memoryType >::forceX, NSWithBody< memoryType >::forceY, and NSWithBody< memoryType >::writeCommon().
|
private |
Interpolation matrix from the Eulerian grid to the Lagrangian points.
Definition at line 28 of file TairaColoniusSolver.h.
|
private |
Regularization matrix form the Lagrangian points to the Eulerian grid.
Definition at line 28 of file TairaColoniusSolver.h.
 1.8.11
1.8.11

